


测试项目一:探测车位时的车速
我们将通过这个测试来判断车辆在不同时速时对车位的识别率是怎么样的,我们进行第一次泊车时的车速是10km/h,我们将以这个速度为基准,以每次增加10km/h的方式进行测试。看看它的极限探测车速是多少。

在测试的过程中我们发现,当车速大于25km/h时,系统会提示车速过快,如果继续进行加速,当速度超过35km/h时,系统会自动关闭自动泊车功能。以不同的车速路过车位10此后得出,只要车速不超过25km/h,自由光均可正常的探测出车位,并进行泊车操作,识别率很高。
需要说明一下,平时我们在寻找车位时,车速一般都会很慢,并不会以实验中的车速进行探测,实验目的仅为测试车辆的识别率。网友请勿模仿。
测试项目二:车位的最小/最大间距
这个测试的目的在于实验车辆自动泊车功能可以识别出的最小/最大车位间距,鉴于我们手中没有官方给出的相应数据,所以我们只能继续用自己的方式进行测量,自由光的车身长度是4624mm,我们将以比车身长度长1000mm为基准进行测试,每次增加100mm,以此来判断车位间距的变化会对识别率带来怎样的影响。
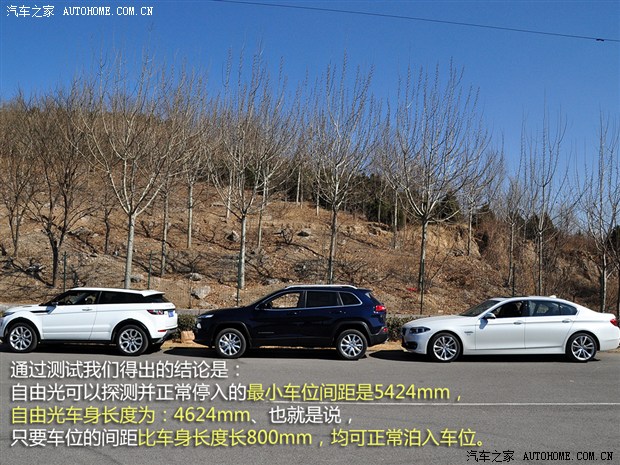

我们在测试时首先测量的是比车身长度长1米的距离,自动泊车系统并没有识别出车位,我们以每次增加100mm的方式进行测试,当增加的距离达到800mm时,也就是车位长度达到5424mm时,自动泊车系统正常识别出了车位,并且可以正常停入车位,通过上面的图片大家可以直观的看到车辆停入车位时的情况。
测试项目三:车身与车位间的最大间距
这项测试的目的是为了实验自动泊车车辆与目标停车位前静止车辆之间的最小距离,我们将以两车之间相距1米为基准进行测试,每次增加100mm,来看看它有怎样的表现。

通过实验我们测得:自由光与目标停车位前的车辆间距大于1700mm时,自动泊车系统会出现无法识别出车位的情况,小于这个距离则可以正常识别出停车位。
测试项目四:车位另一侧有障碍物
我们将通过这个项目测试当目标车位对面也有车辆停放的情况下,自由光和目标车位对面车辆之间的距离会对车位识别带来怎样的影响。

通过测量我们发现,当自由光距离目标车位对面的车辆距离小于1000mm时,及时目标车位符合要求,系统也不会提示找到车位,这样设计的好处是可以避免由于两侧距离过窄而在泊车过程中发生剐蹭的情况。
测试项目五:车位内有障碍物
这个项目是为了测试车辆在自动泊车过程中能否探测到车位内出现的障碍物,及车辆是否可以自动采取制动措施以避免危险的发生。

通过实验我们发现,车辆在自动泊车的过程中可以发现车位内出现的障碍物,并且会在距离障碍物1000mm时采取紧急制动刹停车辆,经过多次测试我们还发现,自由光的自动刹停功能不仅限于自动泊车,在正常倒车的情况下如果后方出现障碍物,系统一样会采取紧急制动来刹停车辆。这个功能也获得了我们的一致好评,对于很多新手而言,这个功能可以帮他们在倒车时避免很多潜在的危险。
凡注有"浙江在线绍兴频道"或电头为"浙江在线绍兴频道"的稿件,均为浙江在线绍兴频道独家版权所有,未经许可不得转载或镜像;授权转载必须注明来源为"浙江在线绍兴频道",并保留"浙江在线绍兴频道"的电头。

网络违法犯罪举报网站 | 12321网络不良与垃圾信息举报受理中心 | 12300电信用户申诉受理中心 | 12318全国文化市场举报网站
本站部分内容来源于网络,若有侵权之处,请联系管理员。凡标为原创的文章,未经许可不得随意转载或引用。

